+86 15633683072
As an important part of modern welding automation, the welding robotic arm is widely used in many fields such as automobile manufacturing, aerospace, shipbuilding and heavy industry for its efficient and precise welding capabilities. Understanding the structure, movement mode and working mechanism of the welding robotic arm will help to grasp its application potential and technical advantages in industrial production.

Robotic arm welding machine is mainly composed of several key components, including:
Robotic arm: usually composed of multiple joints, most of which are 3-axis and 6-axis robotic arms on the market, with different degrees of freedom, and can move flexibly in three-dimensional space. The design of the robotic arm generally uses aluminum alloy or steel to ensure sufficient strength and rigidity while reducing its own weight.
Welding tools: including welding guns, nozzles and electrodes, are key components in the welding process. The choice of welding tools depends on the welding method (such as arc welding, laser welding, etc.) and the type of material.
Drive system: mainly includes motors, reducers and transmission devices, which are responsible for driving the movement of the robotic arm. Motors can be divided into servo motors and stepper motors. Servo motors are widely used in welding robots for their high precision and high responsiveness.
Control system: usually composed of PLC (Programmable Logic Controller) or industrial computer, responsible for the motion control, path planning and welding parameter adjustment of the robot arm.
The movement modes of welding robotic arm mainly include:
Linear movement: The welding robotic arm can move along a straight trajectory, which is suitable for simple welding tasks. For example, in the welding process of a long straight weld, the linear movement of the arm can achieve uniform welding.
Rotational movement: Through the rotation of the joints, the robot arm can perform complex rotational movements in space to adapt to the welding needs of different angles and positions. This movement mode enables the robot to operate flexibly in complex three-dimensional space, and is particularly suitable for applications that require multi-angle welding.
Compound movement: By combining linear and rotational movements, the welding robot arm can perform complex welding paths, such as curved welds or circular welds. This movement mode can significantly improve welding efficiency and weld quality.
The working mechanism of the robotic arm welding machine includes the following key steps:
Path planning: Before welding begins, the control system performs path planning according to the requirements of the welding task. Path planning needs to consider factors such as welding shape, position, speed and welding sequence.
Motion control: After the path planning is completed, the control system controls the drive system to drive the robot arm to move along the predetermined path by issuing instructions. Motion control needs to monitor the position and speed of the welding process in real time to ensure the welding quality.
Welding operation: During the welding process, the welding tool will transfer current to the welding material, melt the metal through arc or other heating methods, and achieve welding. The welding robot can adjust welding parameters such as current, welding speed and welding angle according to real-time feedback to optimize the welding effect.
Monitoring and feedback: The welding robot is equipped with sensors that can monitor the temperature, molten pool state and welding quality in real time during the welding process. Through the feedback system, the robot can automatically adjust the parameters during the welding process to ensure the stability and consistency of the welding.
The structure, movement mode and working mechanism of the welding robotic arm jointly determine its high efficiency and reliability in industrial production. Through precise path planning, flexible motion control and intelligent welding operation, the welding robotic arm will play a greater role in more fields and provide strong support for the development of modern manufacturing industry.
Zhengzhou Kehui Technology Co., Ltd
Email: info@zzkehui.com






 Chinese
Chinese English
English OA
OA Current location:
Current location: Concrete Mixer Drum Robotic Welding Solutions
Concrete Mixer Drum Robotic Welding Solutions  Automobile Body Production Line Welding Fixtures
Automobile Body Production Line Welding Fixtures  Automotive Body Welding Automated Manufacturing Solutions
Automotive Body Welding Automated Manufacturing Solutions  Free-Teaching Programming Welding Robot Cell For I Beam Welding
Free-Teaching Programming Welding Robot Cell For I Beam Welding 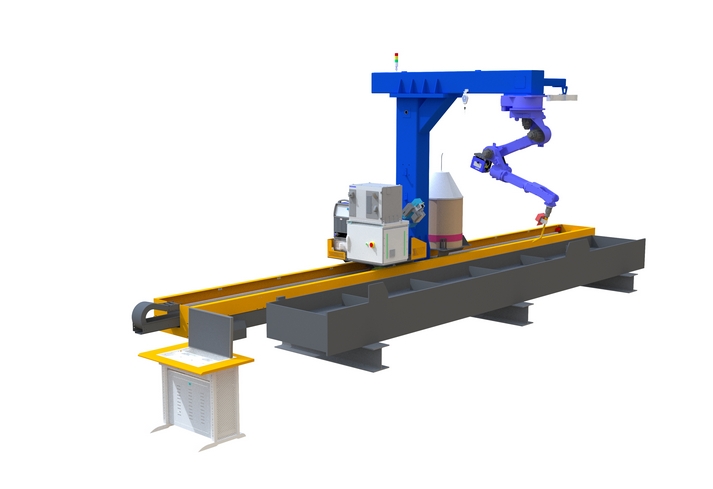 No Programming Required Robotic Welding Systems for H beam Welding Line
No Programming Required Robotic Welding Systems for H beam Welding Line